
 |
A real bomb disposal robot, complete with camera, manipulator
claw, and disruptor
|
(One quick word needs to be said from the outset: this project was carefully and sensitively planned. It was made clear to the students that this was not making light of terrorism, explosives, or other acts of crime. Rather, this was another chance to show how our engineering skills can be used to create things that combat pain and suffering and sinful acts; such robots actually keep humans out of the way of harm as much as possible.)
The students were split into three groups at random, and they set about sketching their designs, in accordance with the design brief. Each robot was required to move through the following phases:
- Power up and deploy, moving down a ramp.
- Make its way to a classroom with a "locked door" (it was made of wood and foamboard!).
- Break through the door and enter the hostile zone.
- Locate the active "bomb", and take it back through the door to a safe location outside.
- Neutralize the bomb with a built-in disruptor.
 |
The "bomb", made out of LEGO Mindstorms pieces, with a touch-
sensitive touch plate on top
|
Eva led her team (Colby, Todd, and David) to include the following features: a rectangular base, a balanced torque/speed arrangement for the wheels, a controllable claw to grapple with the bomb, a giant "cattle catcher" wedge to push through the door, and a chain drive to aim the disruptor up and down. Initial tests worked very well in the classroom, with a high success rate of neutralizing the bomb. Their teamwork was first-rate, with an astounding level of co-ordination and efficiency between the four of them. The team was comfortably ready in time for the demonstration.
 |
| Eva's team's early design, with base and claw in place |
 |
Colby demonstrates the surprising
strength of the robot, dragging a stool
across the room!
|
 |
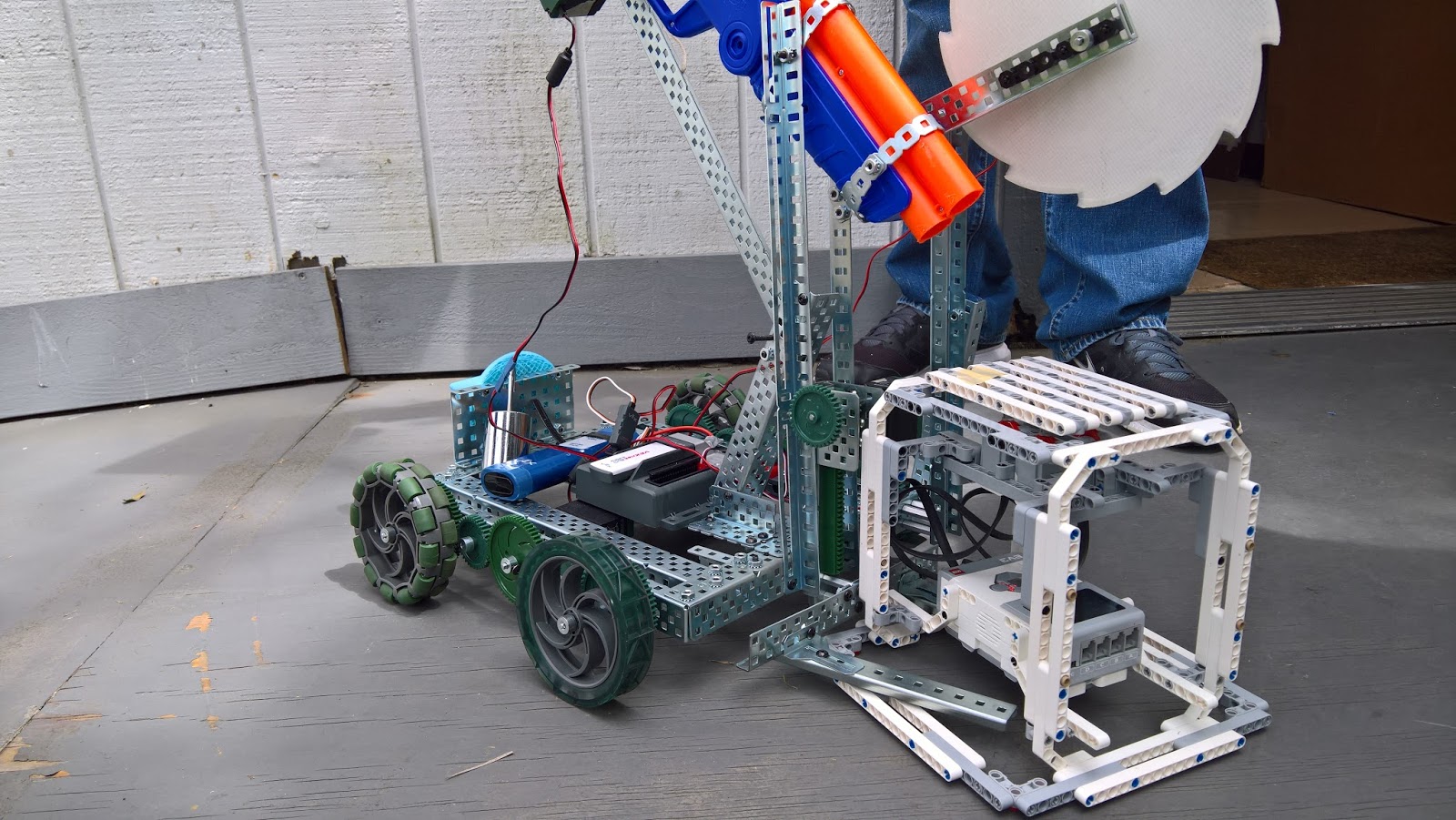
An almost-final version, with the disruptor now mounted; note the
chain drive to pivot and aim the disruptor
|
 |
Todd's "cattle catcher" came out perfectly first time, made with a
simple but beautiful loft between two triangles
|
 |
The finished product, ready and raring
to go!
|
Alena had her first chance at leadership so far this year, with Jakob, Samy, and Claire working alongside. Their robot went for a rectangular base, a higher speed at the wheels, a forklift to actually raise the bomb off the floor to carry it, and a fixed angle for their disruptor. They were then able to use their extra motor to build a high-speed 3D-printed circular saw, for breaking through the foamboard door. That's right--a 3D-printed circular saw! Extra code was built in to ensure that the saw would only activate with a very intentional button sequence!
 |
An early version of Alena's team's solution, with a solid base
constructed (note the "omni-wheels" that allow the robot to more
easily pivot left and right)
|
 |
Alena works on her CAD pieces, Jakob writes code, and Samy
"checks the disruptor for functionality"
|
 |
An early outdoor test; note the addition
of a forklift system on the front
|
 |
| The forklift and fixed disruptor are now clearly visible |
 |
| Claire works to add in the 3D-printed circular saw |
 |
| Yes, this actually did work! (Slowly...) |
Lastly, Josh led his team (Ben, Victor, and Alec) to good success with a larger, more square-ish base, a simple but highly effective spike for punching through the door, an extremely low-speed/high-torque gearing for the wheels, a claw to grab the bomb, and a chain drive to aim their disruptor. They went for the slow-but-strong approach, which made perfect sense for a challenge where time was not a mandated constraint.
 |
The early days of Josh's team's design, with the highest torque to
the wheels of any team (the tiny gear coming from the black motors
to the large gears at the wheels ensures this)
|
 |
Later on, a manipulator claw was added, as well as a powerful
spike, designed by Alec
|
 |
Josh instructs his team in proper safety protocol, as Victor looks
and Alec attaches the disruptor
|
 |
| The final stages, with a chain drive now added to the disruptor |
While all this was happening over the course of several weeks, the teacher assistants Aaron and Kylie put together the door itself, complete with 3D-printed working hinges and deadbolt. Their woodworking skills were put to good use in building a simple frame to hold it all together.
 |
The frame and foamboard door; note the hot pink 3D-printed
working hinges and deadbolt, courtesy of Kylie's design skills
|
On the day of the demonstration, the young engineers eagerly followed along behind the robots as they drove one by one up to the door. After much pushing, and ramming, and cutting, all three robots were able to break through and enter the room. Of special note was Alena's 7" diameter circular saw, which took about two or three minutes to shred the deadbolt!
 |
Eva's team attempts to push through the door with brute force and
the "wedge" principle
|
 |
Alena's team gets ready to cut through the door; note the cyan
spike added to the rear as a backup plan
|
 |
| Josh's team pushes through quickly with a simple spike |
The robots located the bomb, flashing and beeping in the dark. The bomb was rigged with a pressure-sensitive touchplate on the top, which would have activated if the bomb was fumbled. All teams successfully took the bomb outside with no incident (other than the wind blowing the door shut again!).
With the bomb safely outside away from civilians, the robots aimed their air-powered disruptors at the bomb. This is a real tactic that bomb disposal robots use; the idea is that a quick blast from a shotgun shell should immediately destroy all triggers and batteries and other mechanisms, thereby preventing the actual detonation.
Eva's group and Alena's group took a few shots to disarm the bomb (the trigger plate didn't "feel" their bullets enough to switch off), and Josh's team got it first try!
All teams are to be congratulated on a solid, successful performance. The growth exhibited by these students throughout the year is phenomenal--where they once were fumbling with the most basic code lines and how to attach pieces, they now moved through it swiftly and expertly, with a minimum of guidance from the teacher. No teams suffered critical failure, as some had on previous projects, and it was a delight to see the hard work paying off.
If you want to watch the entire play in action, please access them in this shared folder. You are welcome to download or watch online--the videos of each team are over ten minutes long!
Excellent work all, and we'll see you next year!
 |
Eva's team drags the bomb cautiously away towards the door,
Colby at the wheel
|
 |
Alena's team's unique forklift method worked perfectly, deftly
carrying the bomb to the exit
|
 |
Josh's team pulls the bomb over some tricky terrain and back
through the door
|
With the bomb safely outside away from civilians, the robots aimed their air-powered disruptors at the bomb. This is a real tactic that bomb disposal robots use; the idea is that a quick blast from a shotgun shell should immediately destroy all triggers and batteries and other mechanisms, thereby preventing the actual detonation.
Eva's group and Alena's group took a few shots to disarm the bomb (the trigger plate didn't "feel" their bullets enough to switch off), and Josh's team got it first try!
 |
| Eva's team squares up, trying to find the best angle |
 |
| Alena's team hugs the package tightly, and goes in for the finish |
 |
| Josh's team readies, aims, and fires! |
 |
| Eva, David, Colby, and Todd celebrate a job well done! |
 |
| Jakob, Claire, Alena, and Samy proudly pose behind their robot |
 |
| Ben, Alec, Josh, and Victor enjoy a job well done |
All teams are to be congratulated on a solid, successful performance. The growth exhibited by these students throughout the year is phenomenal--where they once were fumbling with the most basic code lines and how to attach pieces, they now moved through it swiftly and expertly, with a minimum of guidance from the teacher. No teams suffered critical failure, as some had on previous projects, and it was a delight to see the hard work paying off.
If you want to watch the entire play in action, please access them in this shared folder. You are welcome to download or watch online--the videos of each team are over ten minutes long!
Excellent work all, and we'll see you next year!
 |
From left to right: Mr. Meadth, Kylie (T.A.), Jakob, Alena, Samy, Claire, Eva,
David, Colby, Todd, Alec, Victor, Josh, Aaron (T.A.); (Ben absent)
|
Quite complex engineering tasks well executed by all the teams. Well done guys.
ReplyDeleteWow. I am super impressed. Good job everyone very interesting reading
ReplyDelete